|
|
 |

|
|
|
As an emerging technology, remotely piloted, mid-sized Unmanned Aircraft Systems (UAS) for cargo operations present both known and unknown challenges for the safety and efficiency of the existing Air Traffic Management system. The Pathfinding for Airspace with Autonomous Vehicles (PAAV) project aims to develop concepts, procedures, and technology to enable airspace access for unmanned air cargo operations with targeted autonomy and integrate them with conventional aircraft in the National Airspace System (NAS).
PAAV is a subproject within the Air Traffic Management - eXploration (ATM-X) project and is a directed research area from NASA's Aeronautics Research Mission Directorate (ARMD).
Purpose and Research Approach
The purpose of this research is to develop requirements, procedures, and technologies to facilitate the seamless integration of large, increasingly autonomous UAS cargo operations into the NAS. Unlike small UAS for package delivery, these large UAS cargo operations are expected to transport a large amount of cargo using mid-sized UAS that flies similar to manned commercial aircraft. An initial market study has shown that the greatest business case exists for a regional operation under 1000 nm. To expand the opportunity for a robust and vibrant UAS market, operations need to include seamless access to the NAS. In this context, "seamless" means that air traffic controllers will not have to do anything significantly different for UAS than they do for traditional aircraft operations. To address these aims, the subproject will engage in research activities supporting investigation into: procedures and technologies for integration with the air traffic management system, methods to assure separation from all traffic and hazards, integration into terminal, runway, and taxi management, resiliency to lost-link and off-nominal conditions, and communications that are robust, seamless and secure.
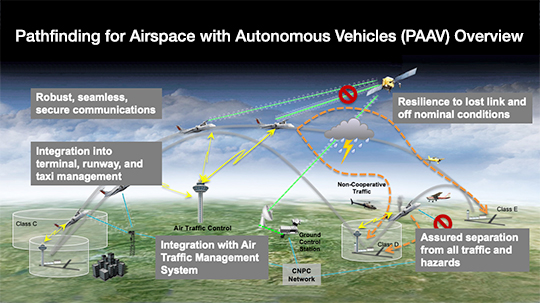
Pathfinding for Airspace with Autonomous Vehicles (PAAV) Overview
Point of Contact: Paul Lee, Ph.D., Human Systems Integration Division, NASA Ames Research Center |
|
|